4611S // ROBOT REVOLUTION
WHO WE ARE
We are a VEX V5 Robotics team based in Summit, NJ.
Driven by precision. Powered by code.
Our Mission: Dominate the field through superior autonomous strategy and
mechanical efficiency.
OPERATIVES
Mission Log
Genesis: The First Build
September 2025Our journey began with a "front-to-front hopper" design. A simple but effective platform to learn the game mechanics.
Hopper Completed
Mid-October 2025The first functional robot was completed, featuring a dual-intake hopper system.
VICTORY: Middle School Excellence Award
December 7, 2025 // Millburn Push BackSecured the highest honor in VEX Robotics at our debut competition. Qualified 16th out of 63 teams.
League #1
January 16, 2026First league meet. 3-1-0 Record. Established baseline reliability.
League #2
January 30, 2026Undefeated 3-0-0 run. Personal record score of 81 set.
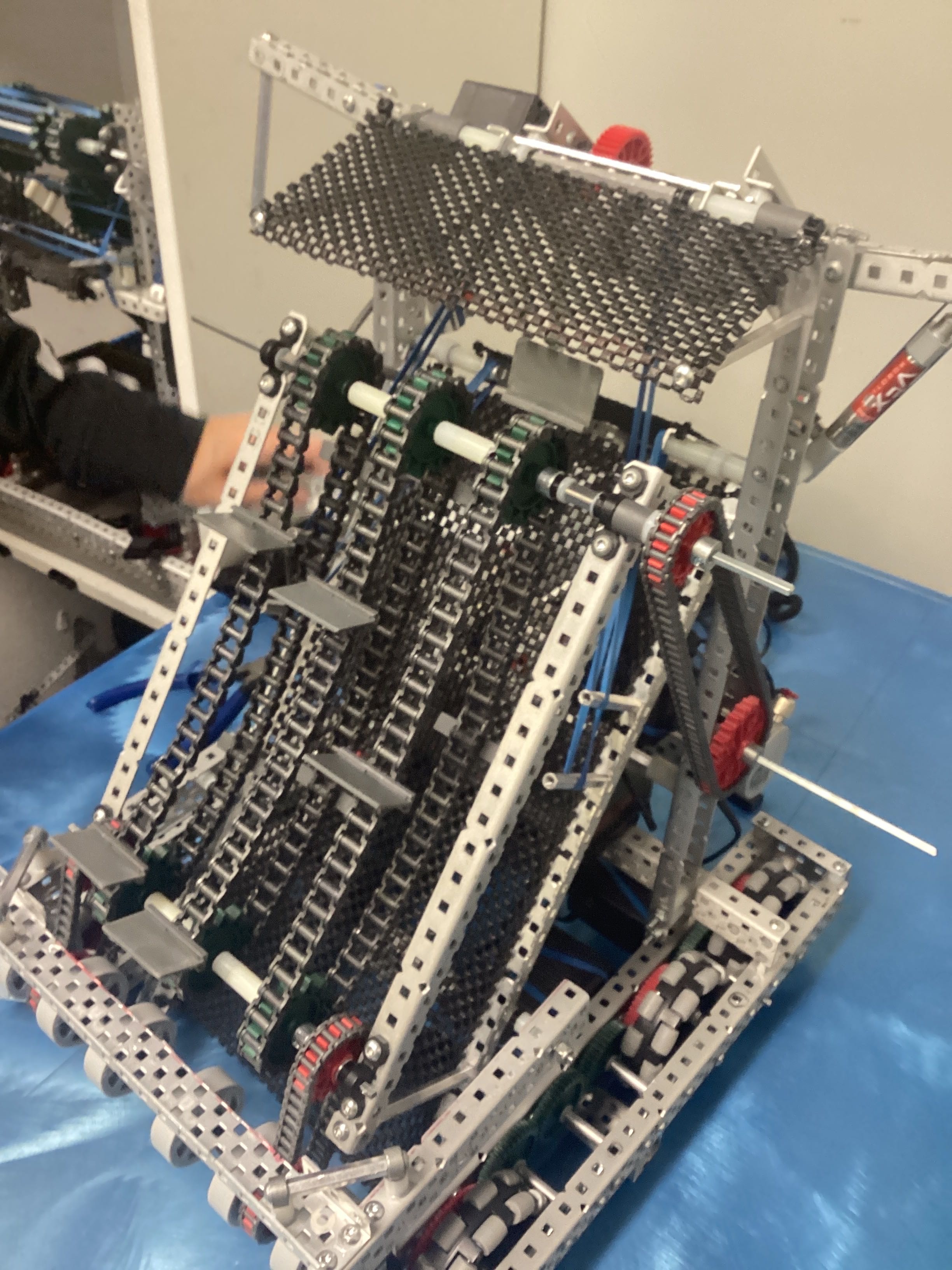
Evolution: The Ruiguan
January 31, 2026The Hopper was disassembled. the Ruiguan front-back bot was born to optimize field traversal.
Finalists: League #3
February 13, 2026 // League #3Achieved 2nd place after a hard-fought 33-35 loss in the finals. A reflective defeat that fueled our determination and finalized the Ruiguan bot.
OBJECTIVE: Millburn 2
February 22, 2026 // UpcomingReturning to Millburn to test the Ruiguan against high school elites. Status: PREPARING
VICTORY: Triple Crown State Champions
March 14, 2026 // NJ State ChampionshipSecured the Excellence Award, Tournament Champion, and Skills Champion. Qualified for the World Championship.
World Championship
April 2026 // Math DivisionReached an all-time high skills rank of 72 combined (52 driver + 20 auton). Competed as the 69th seed.
System Blueprints
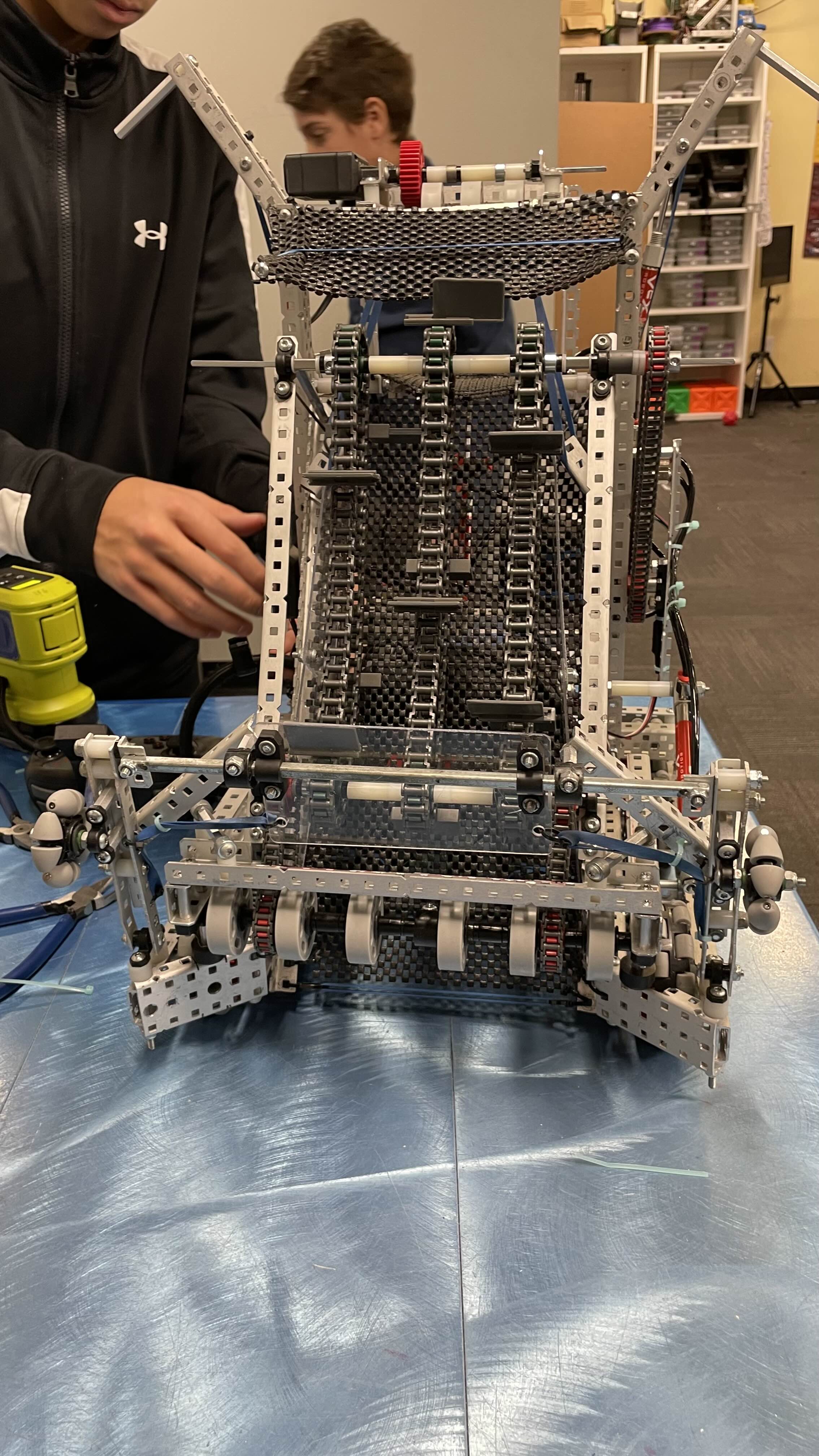
The Tongue
A specialized intake mechanism featuring a flexible plastic sheet mounted on an axle with diagonal metal supports and wheelchair tensioning. This design allows for rapid, jam-free intake of game objects.

Inertial Logic
While the hardware is a simple V5 Inertial Sensor, the code behind it is complex. We utilize advanced PID control loops to ensure precise turning and heading maintenance, correcting for drift instantly during autonomous.
The Aligner
A custom triangular alignment structure on the rear of the chassis. This passive mechanism allows us to instantly square up against the field goal corners, ensuring perfect alignment for long-range shots without complex sensor feedback.